list of peer-reviewed publications in reversed chronological order.
2025
Human-Interactive Robot Learning: Definition, Challenges, and Recommendations
Baraka, K., Idrees, I., Kessler Faulkner, T., Biyik, E., Booth, S., Chetouani, M., Grollman, D. H., Saran, A., Senft, E., Tulli, S., Vollmer, A.-L., Andriella, A., Beierling, H., Horter, T., Kober, J., Sheidlower, I., Taylor, M. E., van Waveren, S., and Xiao, X.
@unpublished{baraka2025hirl,author={Baraka, K. and Idrees, I. and {Kessler Faulkner}, T. and Biyik, E. and Booth, S. and Chetouani, M. and Grollman, D. H. and Saran, A. and Senft, E. and Tulli, S. and Vollmer, A.-L. and Andriella, A. and Beierling, H. and Horter, T. and Kober, J. and Sheidlower, I. and Taylor, M. E. and {van Waveren}, S. and Xiao, X.},title={Human-Interactive Robot Learning: Definition, Challenges, and Recommendations},year={2025},note={Preprint, in submission},html={https://sannevw.github.io/assets/pdf/HIRL_Preprint_2025.pdf}}
2024
Interactive and Explainable Robot Learning: A Comprehensive Review
Seraj, Esameil, Lee, Kin Man, Zaidi, Zulfiqar, Xiao, Qingyu, Li, Zhaoxin, Nascimento, Arthur,
van Waveren, Sanne, Tambwekar, Pradyumna, Paleja, Rohan, Das, Devleena, and others,
This review embarks on a comprehensive exploration of approaches, evaluation methods, and ethical considerations in explainable and interactive systems for robotic applications, distinctly focusing on intelligent systems that are specifically designed for learning automated agents. Given the increasing integration of robots in daily life, it is crucial to focus on intelligent systems that can not only learn and adapt, but can also offer clarity and comprehension for their actions. The interactive component of these systems is thoroughly examined, evaluating the algorithms, the modalities used in interaction, and the significance of mixed-initiative and shared autonomy. We spotlight adaptive and adaptable methods, emphasizing the centrality of user-inspired research and personalized approaches in interactive robotics. A rigorous examination of safety and ethical considerations of these intelligent systems anchors the discussion, including aspects of transparency, privacy, accountability, biases, and psychological well-being. The review evaluates existing metrics and benchmarking standards for such systems and explores their practical applications across domains such as healthcare, domestic tasks, and industrial automation. Concluding with key insights and directions for future research, we provide design guidelines and points of consensus for each subject in order to equip readers with a nuanced understanding of current trends and tools in explainable and interactive robotic systems, paving the way for informed research and application in this dynamic field.
@article{seraj2024interactive,title={Interactive and Explainable Robot Learning: A Comprehensive Review},author={Seraj, Esameil and Lee, Kin Man and Zaidi, Zulfiqar and Xiao, Qingyu and Li, Zhaoxin and Nascimento, Arthur and {van Waveren}, Sanne and Tambwekar, Pradyumna and Paleja, Rohan and Das, Devleena and others},journal={Foundations and Trends® in Robotics},volume={12},number={2-3},pages={75--349},year={2024},html={https://www.nowpublishers.com/article/Details/ROB-081},publisher={Now Publishers, Inc.}}
Autonomous Vehicles: A Technical Introduction
Pek, Christian, and van Waveren, Sanne
In Autonomous Vehicles and Civil Liability in a Global Perspective: Liability Law Study across the World in relation to SAE J3016 Standard for Driving Automation 2024
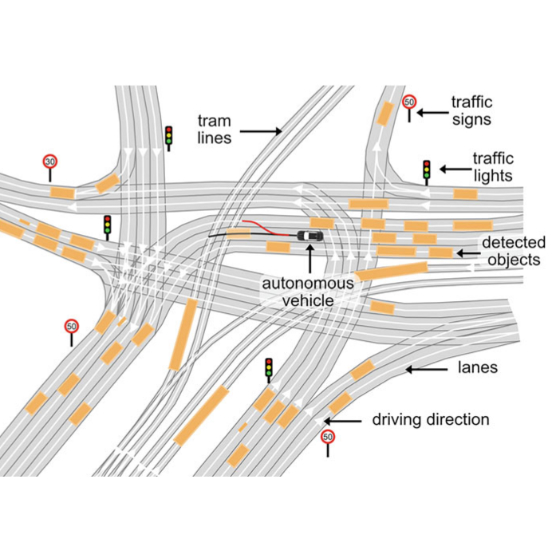
Automated and fully autonomous vehicles have the potential to revolutionize mobility in various areas, mostly notably are the opportunities to improve traffic safety and mobility access. This chapter provides a technical overview of the basic working principles of such vehicles: from processing of sensor data to planning safe and comfortable motions for the vehicle to execute. The chapter concludes by summarizing major challenges that need to be solved on the way to releasing commercial vehicles that are always reliable and safe.
@inproceedings{pek2024autonomous,author={Pek, Christian and {van Waveren}, Sanne},editor={Steege, Hans and Caggiano, Ilaria Amelia and Gaeta, Maria Cristina and von Bodungen, Benjamin},title={Autonomous Vehicles: A Technical Introduction},booktitle={Autonomous Vehicles and Civil Liability in a Global Perspective: Liability Law Study across the World in relation to SAE J3016 Standard for Driving Automation},year={2024},publisher={Springer International Publishing},address={Cham},pages={35--63},isbn={978-3-031-41992-8},doi={10.1007/978-3-031-41992-8_2},html={https://doi.org/10.1007/978-3-031-41992-8_2}}
Mixed-Initiative Human-Robot Teaming under Suboptimality with Online Bayesian Adaptation
Natarajan, Manisha, Xue, Chunyue,
van Waveren, Sanne, Feigh, Karen, and Gombolay, Matthew
In Proceedings of the 23rd International Conference on Autonomous Agents and Multiagent Systems 2024
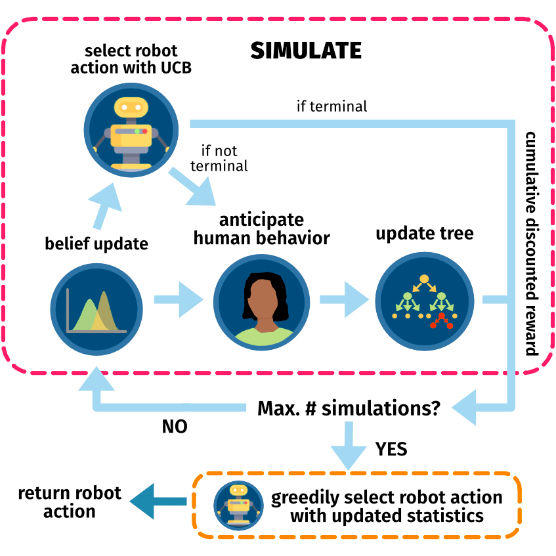
For effective human-agent teaming, robots and other artificial intelligence (AI) agents must infer their human partner’s abilities and behavioral response patterns and adapt accordingly. Most prior works make the unrealistic assumption that one or more teammates can act near-optimally. In real-world collaboration, humans and autonomous agents can be suboptimal, especially when each only has partial domain knowledge. In this work, we develop computational modeling and optimization techniques for enhancing the performance of human-agent teams, where both the human and the robotic agent have asymmetric capabilities and act suboptimally due to incomplete environmental knowledge. We adopt an online Bayesian approach that enables a robot to infer people’s willingness to comply with its assistance in a sequential decision-making game. Our user studies show that user preferences and team performance vary with robot intervention styles, and our approach for mixed-initiative collaboration enhances objective team performance (p<.001) and subjective measures, such as user’s trust (p<.001) and perceived likeability of the robot (p<.001).
@inproceedings{natarajan2024mixed,title={Mixed-Initiative Human-Robot Teaming under Suboptimality with Online Bayesian Adaptation},author={Natarajan, Manisha and Xue, Chunyue and {van Waveren}, Sanne and Feigh, Karen and Gombolay, Matthew},selected={true},booktitle={Proceedings of the 23rd International Conference on Autonomous Agents and Multiagent Systems},pages={1454--1462},year={2024},html={https://dl.acm.org/doi/abs/10.5555/3635637.3663005}}
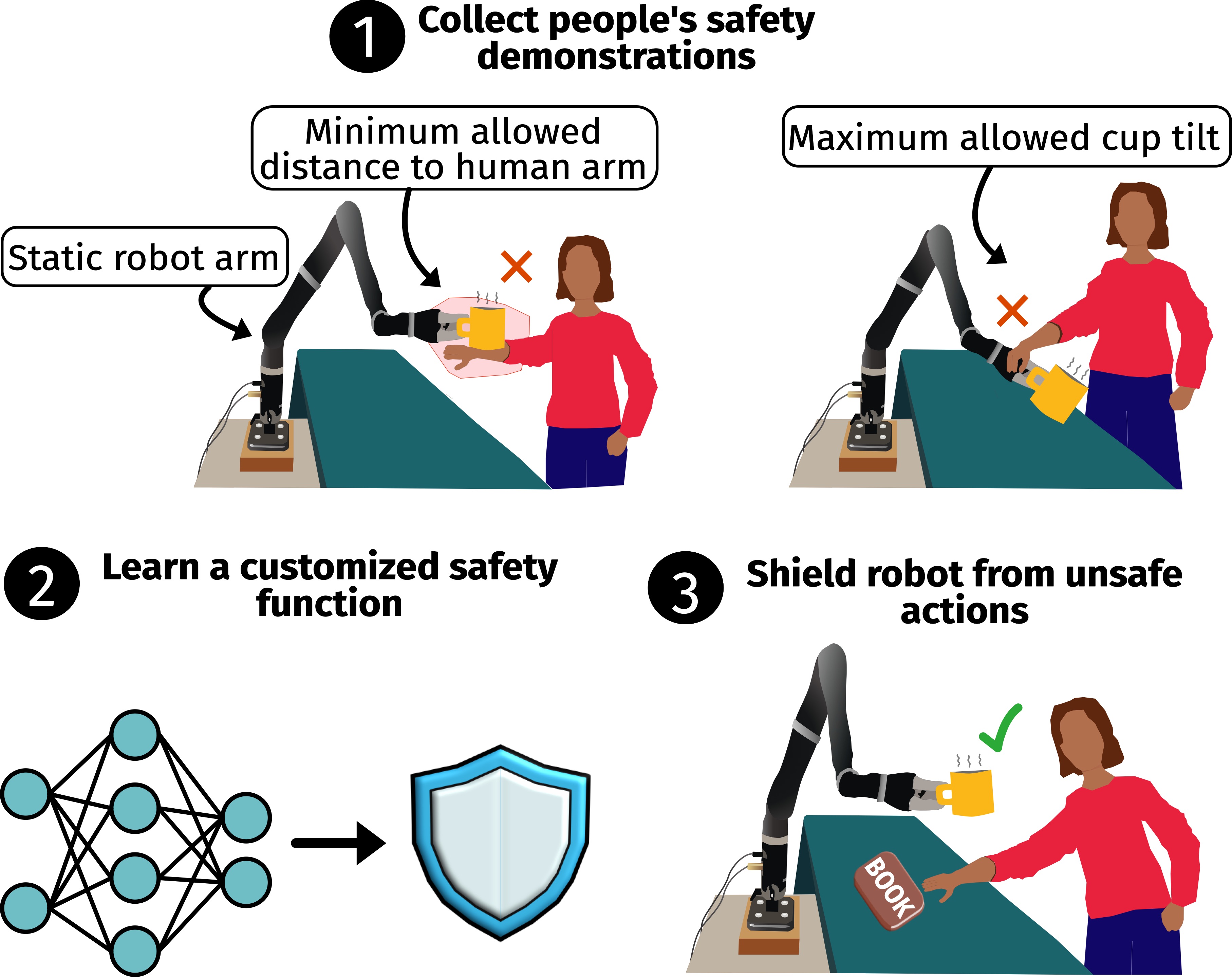
Enhancing Safety in Learning from Demonstration Algorithms via Control Barrier Function Shielding
Yang, Yue*, Chen, Letian*, Zaidi, Zulfiqar*,
van Waveren, Sanne, Krishna, Arjun, and Gombolay, Matthew
In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction 2024
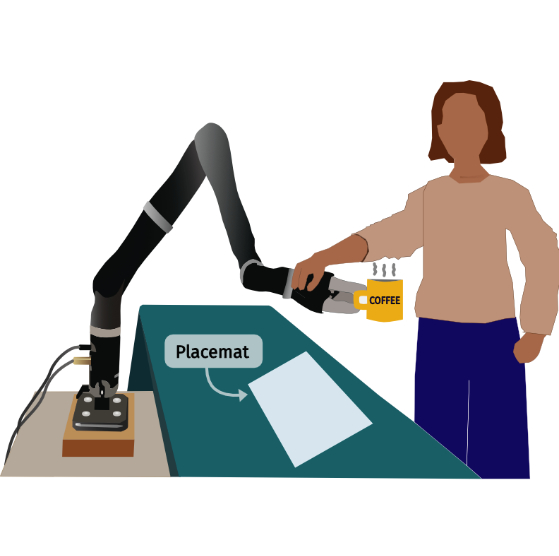
Learning from Demonstration (LfD) is a powerful method for non-roboticists end-users to teach robots new tasks, enabling them to customize the robot behavior. However, modern LfD techniques do not explicitly synthesize safe robot behavior, which limits the deployability of these approaches in the real world. To enforce safety in LfD without relying on experts, we propose a new framework, SElding with Control barrier fUnctions in inverse REinforcement learning (SECURE), which learns a customized Control Barrier Function (CBF) from end-users that prevents robots from taking unsafe actions while imposing little interference with the task completion. We evaluate SECURE in three sets of experiments. First, we empirically validate SECURE learns a high-quality CBF from demonstrations and outperforms conventional LfD methods on simulated robotic and autonomous driving tasks with improvements on safety by up to 100%. Second, we demonstrate that roboticists can leverage SECURE to outperform conventional LfD approaches on a real-world knife-cutting, meal-preparation task by 12.5% in task completion while driving the number of safety violations to zero. Finally, we demonstrate in a user study that non-roboticists can use SECURE to effectively teach the robot safe policies that avoid collisions with the person and prevent coffee from spilling.
@inproceedings{yang2024enhancing,author={Yang, Yue* and Chen, Letian* and Zaidi, Zulfiqar* and {van Waveren}, Sanne and Krishna, Arjun and Gombolay, Matthew},title={Enhancing Safety in Learning from Demonstration Algorithms via Control Barrier Function Shielding},selected={true},year={2024},isbn={9798400703225},publisher={Association for Computing Machinery},address={New York, NY, USA},url={https://doi.org/10.1145/3610977.3635002},doi={10.1145/3610977.3635002},html={https://dl.acm.org/doi/10.1145/3610977.3635002},booktitle={Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction},pages={820–829},numpages={10},keywords={control barrier function, learning from demonstration, safety},location={Boulder, CO, USA, },series={HRI '24}}
2023
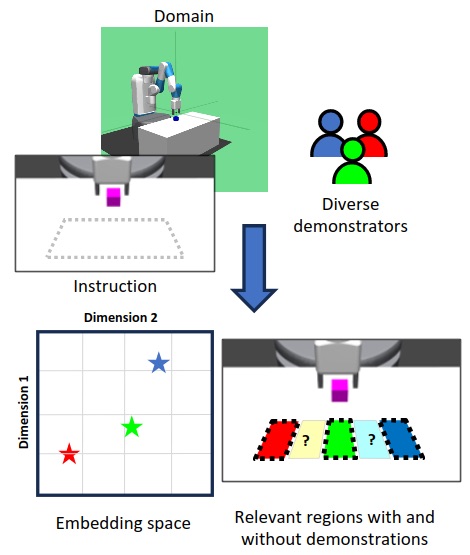
Generalized Behavior Learning from Diverse Demonstrations
Sreeramdass, Varshith, Paleja, Rohan R, Chen, Letian,
van Waveren, Sanne, and Gombolay, Matthew
In First Workshop on Out-of-Distribution Generalization in Robotics at Conference on Robot Learning (CoRL) 2023
Learning robot control policies through reinforcement learning can be challenging due to the complexity of designing rewards, which often result in unexpected behaviors. Imitation Learning overcomes this issue by using demonstrations to create policies that mimic expert behaviors. However, experts often demonstrate varied approaches to tasks. Capturing this variability is crucial for understanding and adapting to diverse scenarios. Prior methods capture variability by optimizing for behavior diversity alongside imitation. Yet, naive formulations of diversity can result in meaningless representation of latent factors, hindering generalization to novel scenarios. We propose Guided Strategy Discovery (GSD), a novel regularization method that specifically promotes expert-specified, task-relevant diversity. In the recovery of unseen expert behaviors, GSD improves 11% over the next best baseline across three continuous control tasks on average.
@inproceedings{sreeramdass2023generalized,title={Generalized Behavior Learning from Diverse Demonstrations},author={Sreeramdass, Varshith and Paleja, Rohan R and Chen, Letian and {van Waveren}, Sanne and Gombolay, Matthew},booktitle={First Workshop on Out-of-Distribution Generalization in Robotics at Conference on Robot Learning (CoRL)},year={2023},html={https://openreview.net/pdf?id=5uEkcZZCnk}}
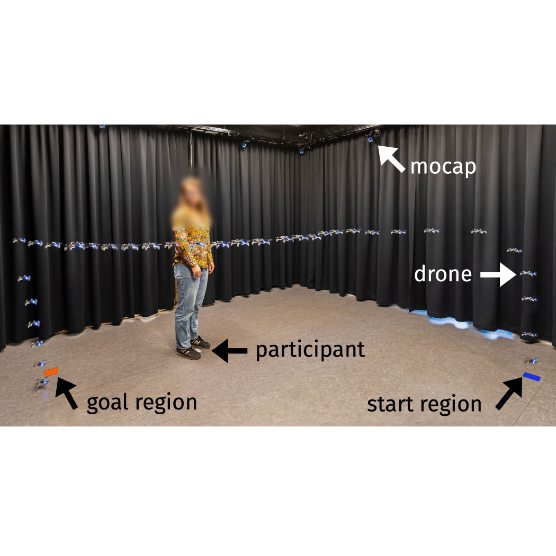
Increasing perceived safety in motion planning for human-drone interaction
Van Waveren, Sanne, Rudling, Rasmus, Leite, Iolanda, Jensfelt, Patric, and Pek, Christian
In Proceedings of the 2023 ACM/IEEE International Conference on Human-Robot Interaction 2023
Safety is crucial for autonomous drones to operate close to humans. Besides avoiding unwanted or harmful contact, people should also perceive the drone as safe. Existing safe motion planning approaches for autonomous robots, such as drones, have primarily focused on ensuring physical safety, e.g., by imposing constraints on motion planners. However, studies indicate that ensuring physical safety does not necessarily lead to perceived safety. Prior work in Human-Drone Interaction (HDI) shows that factors such as the drone’s speed and distance to the human are important for perceived safety. Building on these works, we propose a parameterized control barrier function (CBF) that constrains the drone’s maximum deceleration and minimum distance to the human and update its parameters on people’s ratings of perceived safety. We describe an implementation and evaluation of our approach. Results of a within-subject user study (N=15) show that we can improve perceived safety of a drone by adjusting to people individually.
@inproceedings{vanWaveren2023increasing,title={Increasing perceived safety in motion planning for human-drone interaction},author={Van Waveren, Sanne and Rudling, Rasmus and Leite, Iolanda and Jensfelt, Patric and Pek, Christian},booktitle={Proceedings of the 2023 ACM/IEEE International Conference on Human-Robot Interaction},pages={446--455},year={2023},html={https://dl.acm.org/doi/abs/10.1145/3568162.3576966},selected={true}}
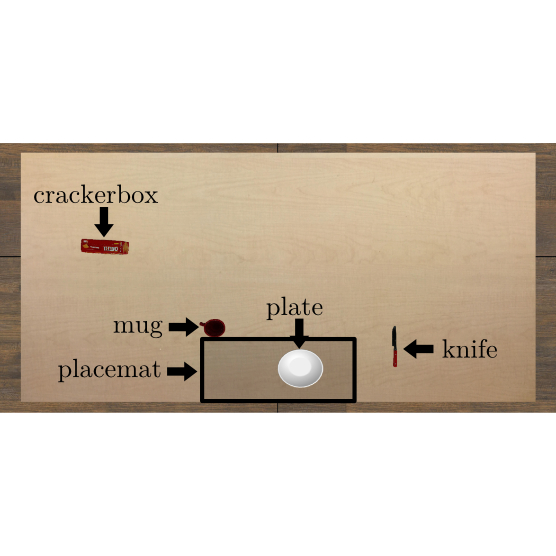
Generating Scenarios from High-Level Specifications for Object Rearrangement Tasks
Van Waveren, Sanne, Pek, Christian, Leite, Iolanda, Tumova, Jana, and Kragic, Danica
In IEEE Int. Conf. on Intelligent Robots and Systems 2023
Rearranging objects is an essential skill for robots. To quickly teach robots new rearrangements tasks, we would like to generate training scenarios from high-level specifications that define the relative placement of objects for the task at hand. Ideally, to guide the robot’s learning we also want to be able to rank these scenarios according to their difficulty. Prior work has shown how generating diverse scenario from specifications and providing the robot with easy-to-difficult samples can improve the learning. Yet, existing scenario generation methods typically cannot generate diverse scenarios while controlling their difficulty. We address this challenge by conditioning generative models on spatial logic specifications to generate spatially-structured scenarios that meet the specification and desired difficulty level. Our experiments showed that generative models are more effective and data-efficient than rejection sampling and that the spatially-structured scenarios can drastically improve training of downstream tasks by orders of magnitude.
@inproceedings{vanWaveren2023generating,title={Generating Scenarios from High-Level Specifications for Object Rearrangement Tasks},author={Van Waveren, Sanne and Pek, Christian and Leite, Iolanda and Tumova, Jana and Kragic, Danica},booktitle={IEEE Int. Conf. on Intelligent Robots and Systems},code={https://github.com/sannevw/scenario_generation},html={https://www.diva-portal.org/smash/get/diva2:1787947/FULLTEXT01.pdf},year={2023}}
The Imperfectly Relatable Robot: An Interdisciplinary Workshop on the Role of Failure in HRI
Harrison, Katherine, Perugia, Giulia, Correia, Filipa, Somasundaram, Kavyaa,
van Waveren, Sanne, Paiva, Ana, and Loutfi, Amy
In Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction 2023
Focusing on failure to improve human-robot interactions represents a novel approach that calls into question human expectations of robots, as well as posing ethical and methodological challenges to researchers. Fictional representations of robots (still for many non-expert users the primary source of expectations and assumptions about robots) often emphasize the ways in which robots surpass/perfect humans, rather than portraying them as fallible. Thus, to encounter robots that come too close, drop items or stop suddenly starts to close the gap between fiction and reality. These kinds of failures - if mitigated by explanation or recovery procedures - have the potential to make the robot a little more relatable and human-like. However, studying failures in human-robot interaction requires producing potentially difficult or uncomfortable interactions in which robots failing to behave as expected may seem counterintuitive and unethical. In this space, interdisciplinary conversations are the key to untangling the multiple challenges and bringing themes of power and context into view. In this workshop, we invite researchers from across the disciplines to an interactive, interdisciplinary discussion around failure in social robotics. Topics for discussion include (but are not limited to) methodological and ethical challenges around studying failure in HRI, epistemological gaps in defining and understanding failure in HRI, sociocultural expectations around failure and users’ responses.
@inproceedings{harrison2023imperfectly,title={The Imperfectly Relatable Robot: An Interdisciplinary Workshop on the Role of Failure in HRI},author={Harrison, Katherine and Perugia, Giulia and Correia, Filipa and Somasundaram, Kavyaa and {van Waveren}, Sanne and Paiva, Ana and Loutfi, Amy},booktitle={Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction},pages={917--919},year={2023},html={https://dl.acm.org/doi/abs/10.1145/3568294.3579952?casa_token=8mFt87_2b7EAAAAA:epQTTn0p2jP2dcqhpgeksDNZkcm84KRoLzJxqLEwKjJUxWC5ktfMJ3cMzviLW9XV37Rt7YMMCCss5nM}}
2022
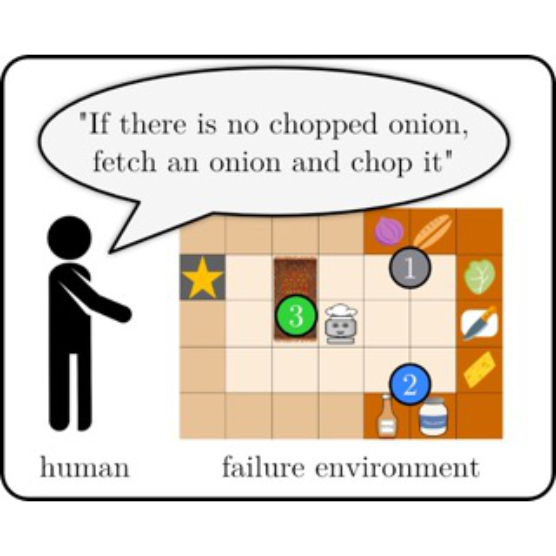
Correct Me If I’m Wrong: Using Non-Experts to Repair Reinforcement Learning Policies
Van Waveren, Sanne, Pek, Christian, Tumova, Jana, and Leite, Iolanda
In Proceedings of the 17th ACM/IEEE International Conference on Human-Robot Interaction 2022
Reinforcement learning has shown great potential for learning sequential decision-making tasks. Yet, it is difficult to anticipate all possible real-world scenarios during training, causing robots to inevitably fail in the long run. Many of these failures are due to variations in the robot’s environment. Usually experts are called to correct the robot’s behavior; however, some of these failures do not necessarily require an expert to solve them. In this work, we query non-experts online for help and explore 1) if/how non-experts can provide feedback to the robot after a failure and 2) how the robot can use this feedback to avoid such failures in the future by generating shields that restrict or correct its high-level actions. We demonstrate our approach on common daily scenarios of a simulated kitchen robot. The results indicate that non-experts can indeed understand and repair robot failures. Our generated shields accelerate learning and improve data-efficiency during retraining.
@inproceedings{vanWaveren2022correct,title={Correct Me If I'm Wrong: Using Non-Experts to Repair Reinforcement Learning Policies},author={Van Waveren, Sanne and Pek, Christian and Tumova, Jana and Leite, Iolanda},booktitle={Proceedings of the 17th ACM/IEEE International Conference on Human-Robot Interaction},pages={1--9},year={2022},html={https://sannevw.github.io/assets/pdf/vanWaveren_Hri2022_Final_PP.pdf},selected={true}}
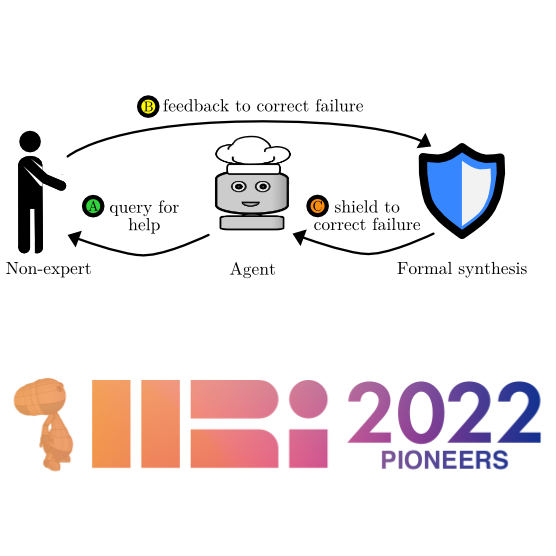
Leveraging Non-Experts and Formal Methods to Automatically Correct Robot Failures
Van Waveren, Sanne
In Proceedings of the 2022 ACM/IEEE International Conference on Human-Robot Interaction 2022
State-of-the-art robots are not yet fully equipped to automatically correct their policy when they encounter new situations during deployment. We argue that in common everyday robot tasks, failures may be resolved by knowledge that non-experts could provide. Our research aims to integrate elements of formal synthesis approaches into computational human-robot interaction to develop verifiable robots that can automatically correct their policy using non-expert feedback on the fly. Preliminary results from two online studies show that non-experts can indeed correct failures and that robots can use the feedback to automatically synthesize correction mechanisms to avoid failures.
@inproceedings{vanWaveren2022leveraging,title={Leveraging Non-Experts and Formal Methods to Automatically Correct Robot Failures},author={Van Waveren, Sanne},booktitle={Proceedings of the 2022 ACM/IEEE International Conference on Human-Robot Interaction},pages={1182--1184},year={2022},html={https://sannevw.github.io/assets/pdf/vanWaveren_HRI_Pioneers_2022_PP.pdf}}
2021
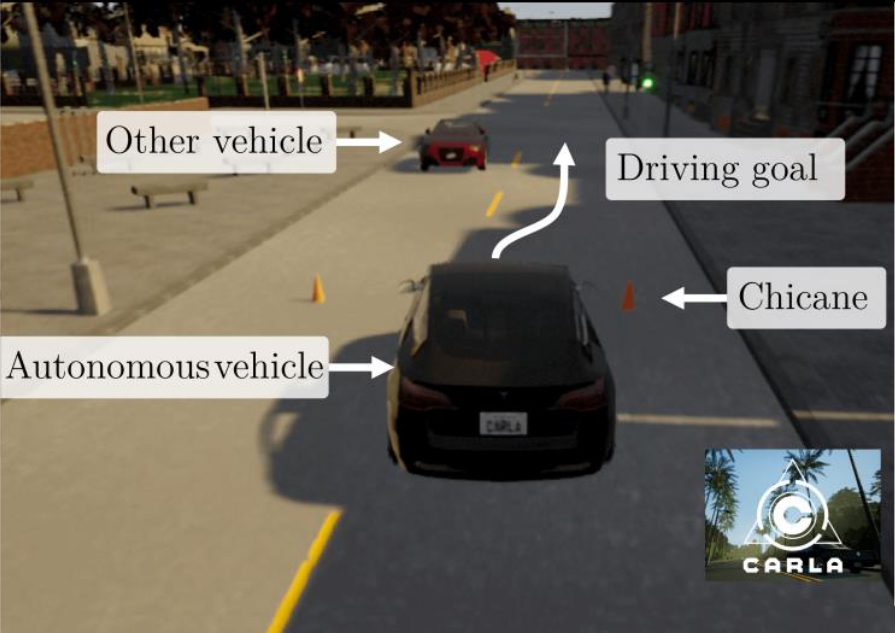
Encoding Human Driving Styles in Motion Planning for Autonomous Vehicles
Karlsson, Jesper*,
van Waveren, Sanne*, Pek, Christian, Torre, Ilaria, Leite, Iolanda, and Tumova, Jana
In ICRA International Conference on Robotics and Automation 2021
Driving styles play a major role in the acceptance and use of autonomous vehicles. Yet, existing motion planning techniques can often only incorporate simple driving styles that are modeled by the developers of the planner and not tailored to the passenger. We present a new approach to encode human driving styles through the use of signal temporal logic and its robustness metrics. Specifically, we use a penalty structure that can be used in many motion planning frameworks, and calibrate its parameters to model different automated driving styles. We combine this penalty structure with a set of signal temporal logic formula, based on the Responsibility-Sensitive Safety model, to generate trajectories that we expected to correlate with three different driving styles: aggressive, neutral, and defensive. An online study showed that people perceived different parameterizations of the motion planner as unique driving styles, and that most people tend to prefer a more defensive automated driving style, which correlated to their self-reported driving style.
@inproceedings{karlsson2021encoding,title={Encoding Human Driving Styles in Motion Planning for Autonomous Vehicles},author={Karlsson, Jesper* and {van Waveren}, Sanne* and Pek, Christian and Torre, Ilaria and Leite, Iolanda and Tumova, Jana},booktitle={ICRA International Conference on Robotics and Automation},year={2021},selected={true},html={https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9561777},video={https://youtu.be/z5IXIdPKX_o}}
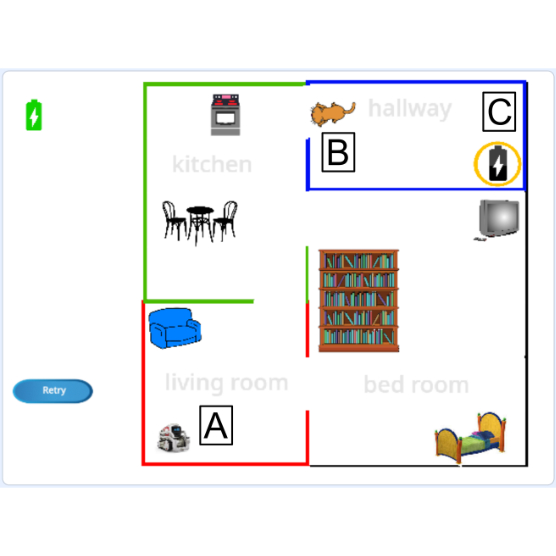
Exploring Non-Expert Robot Programming Through Crowdsourcing
Van Waveren, Sanne, Carter, Elizabeth J, Örnberg, Oscar, and Leite, Iolanda
A longstanding barrier to deploying robots in the real world is the ongoing need to author robot behavior. Remote data collection–particularly crowdsourcing—is increasingly receiving interest. In this paper, we make the argument to scale robot programming to the crowd and present an initial investigation of the feasibility of this proposed method. Using an off-the-shelf visual programming interface, non-experts created simple robot programs for two typical robot tasks (navigation and pick-and-place). Each needed four subtasks with an increasing number of programming statements (if statement, while loop, variables) for successful completion of the programs. Initial findings of an online study (N = 279) indicate that non-experts, after minimal instruction, were able to create simple programs using an off-the-shelf visual programming interface. We discuss our findings and identify future avenues for this line of research.
@article{vanWaveren2021exploring,title={Exploring Non-Expert Robot Programming Through Crowdsourcing},author={Van Waveren, Sanne and Carter, Elizabeth J and {\"O}rnberg, Oscar and Leite, Iolanda},journal={Frontiers in Robotics and AI},pages={242},year={2021},publisher={Frontiers},html={https://www.frontiersin.org/articles/10.3389/frobt.2021.646002/full}}
2020
Embodiment effects in interactions with failing robots
Kontogiorgos, Dimosthenis,
van Waveren, Sanne, Wallberg, Olle, Pereira, Andre, Leite, Iolanda, and Gustafson, Joakim
In Proceedings of the 2020 CHI conference on human factors in computing systems 2020
The increasing use of robots in real-world applications will inevitably cause users to encounter more failures in interactions. While there is a longstanding effort in bringing human-likeness to robots, how robot embodiment affects users’ perception of failures remains largely unexplored. In this paper, we extend prior work on robot failures by assessing the impact that embodiment and failure severity have on people’s behaviours and their perception of robots. Our findings show that when using a smart-speaker embodiment, failures negatively affect users’ intention to frequently interact with the device, however not when using a human-like robot embodiment. Additionally, users significantly rate the human-like robot higher in terms of perceived intelligence and social presence. Our results further suggest that in higher severity situations, human-likeness is distracting and detrimental to the interaction. Drawing on quantitative findings, we discuss benefits and drawbacks of embodiment in robot failures that occur in guided tasks.
@inproceedings{kontogiorgos2020embodiment,title={Embodiment effects in interactions with failing robots},author={Kontogiorgos, Dimosthenis and {van Waveren}, Sanne and Wallberg, Olle and Pereira, Andre and Leite, Iolanda and Gustafson, Joakim},booktitle={Proceedings of the 2020 CHI conference on human factors in computing systems},pages={1--14},year={2020},html={https://dl.acm.org/doi/pdf/10.1145/3313831.3376372},video={https://youtu.be/MxGerI0Bc-U}}
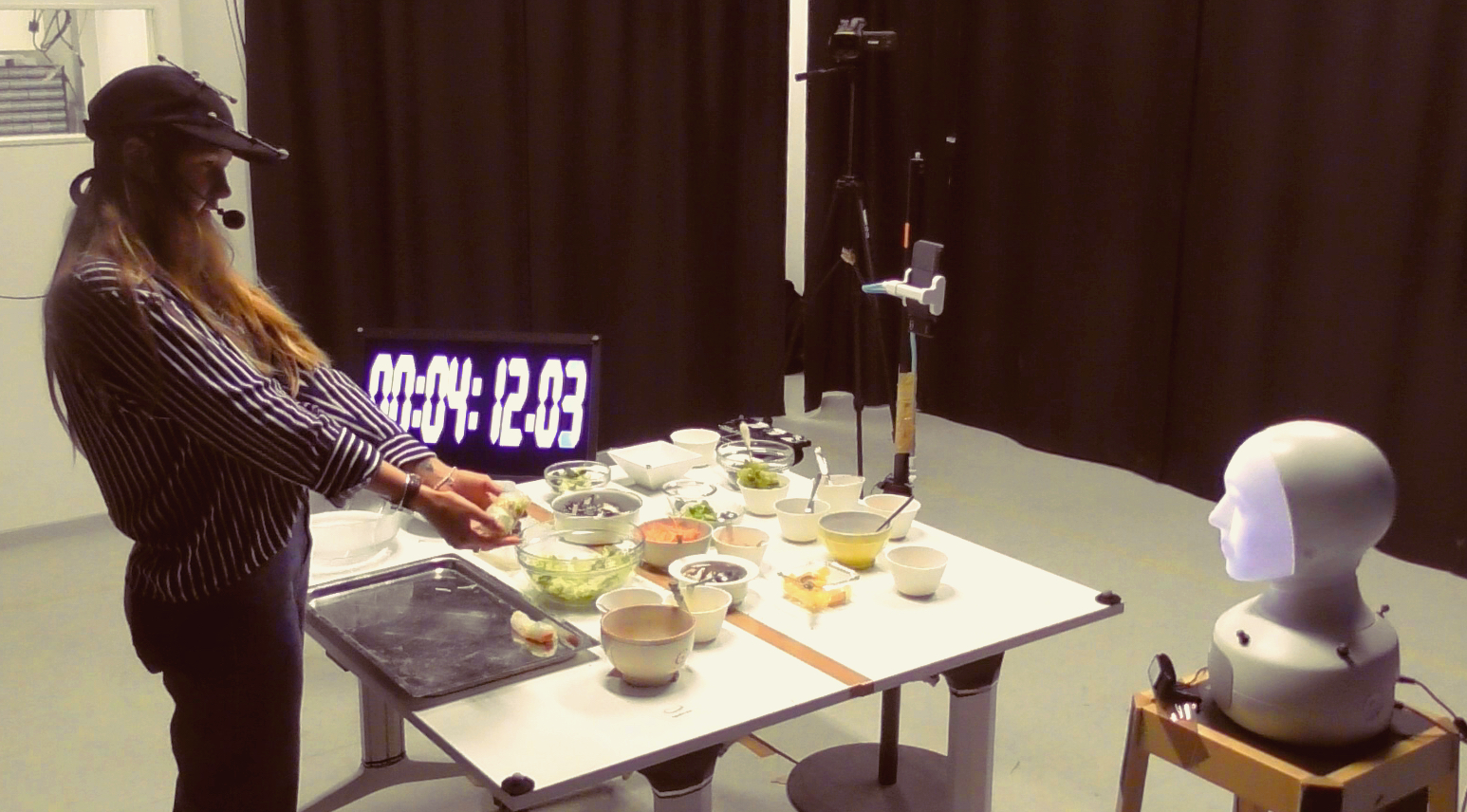
Behavioural responses to robot conversational failures
Kontogiorgos, Dimosthenis, Pereira, Andre, Sahindal, Boran,
van Waveren, Sanne, and Gustafson, Joakim
In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction 2020
Humans and robots will increasingly collaborate in domestic environments which will cause users to encounter more failures in interactions. Robots should be able to infer conversational failures by detecting human users’ behavioural and social signals. In this paper, we study and analyse these behavioural cues in response to robot conversational failures. Using a guided task corpus, where robot embodiment and time pressure are manipulated, we ask human annotators to estimate whether user affective states differ during various types of robot failures. We also train a random forest classifier to detect whether a robot failure has occurred and compare results to human annotator benchmarks. Our findings show that human-like robots augment users’ reactions to failures, as shown in users’ visual attention, in comparison to non-human-like smart-speaker embodiments. The results further suggest that speech behaviours are utilised more in responses to failures when non-human-like designs are present. This is particularly important to robot failure detection mechanisms that may need to consider the robot’s physical design in its failure detection model.
@inproceedings{kontogiorgos2020behavioural,title={Behavioural responses to robot conversational failures},author={Kontogiorgos, Dimosthenis and Pereira, Andre and Sahindal, Boran and {van Waveren}, Sanne and Gustafson, Joakim},booktitle={Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction},pages={53--62},year={2020},selected={true},html={https://dl.acm.org/doi/pdf/10.1145/3319502.337478}}
Gesticulator: A framework for semantically-aware speech-driven gesture generation [Best Paper Award]
Kucherenko, Taras, Jonell, Patrik,
van Waveren, Sanne, Henter, Gustav Eje, Alexandersson, Simon, Leite, Iolanda, and Kjellström, Hedvig
In Proceedings of the 2020 International Conference on Multimodal Interaction 2020
During speech, people spontaneously gesticulate, which plays a key role in conveying information. Similarly, realistic co-speech gestures are crucial to enable natural and smooth interactions with social agents. Current data-driven co-speech gesture generation systems use a single modality for representing speech: either audio or text. These systems are therefore confined to producing either acoustically-linked beat gestures or semantically-linked gesticulation (e.g., raising a hand when saying “high”): they cannot appropriately learn to generate both gesture types. We present a model designed to produce arbitrary beat and semantic gestures together. Our deep-learning based model takes both acoustic and semantic representations of speech as input, and generates gestures as a sequence of joint angle rotations as output. The resulting gestures can be applied to both virtual agents and humanoid robots. Subjective and objective evaluations confirm the success of our approach.
@inproceedings{kucherenko2020gesticulator,title={Gesticulator: A framework for semantically-aware speech-driven gesture generation},author={Kucherenko, Taras and Jonell, Patrik and {van Waveren}, Sanne and Henter, Gustav Eje and Alexandersson, Simon and Leite, Iolanda and Kjellstr{\"o}m, Hedvig},booktitle={Proceedings of the 2020 International Conference on Multimodal Interaction},pages={242--250},year={2020},selected={true},html={https://svito-zar.github.io/papers/Gesticulator_ICMI_2020.pdf},code={https://github.com/Svito-zar/gesticulator},award={Best paper award}}
2019
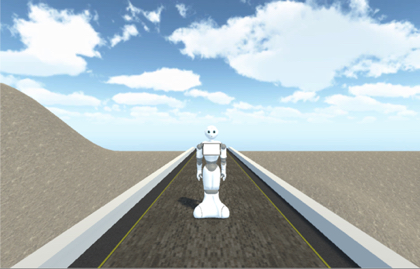
Comparing Human-Robot Proxemics between Virtual Reality and the Real World
Li, Rui, Almkerk, Marc,
van Waveren, Sanne, Carter, Elizabeth, and Leite, Iolanda
In 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI) 2019
Virtual Reality (VR) can greatly benefit Human-Robot Interaction (HRI) as a tool to effectively iterate across robot designs. However, possible system limitations of VR could influence the results such that they do not fully reflect real-life encounters with robots. In order to better deploy VR in HRI, we need to establish a basic understanding of what the differences are between HRI studies in the real world and in VR. This paper investigates the differences between the real life and VR with a focus on proxemic preferences, in combination with exploring the effects of visual familiarity and spatial sound within the VR experience. Results suggested that people prefer closer interaction distances with a real, physical robot than with a virtual robot in VR. Additionally, the virtual robot was perceived as more discomforting than the real robot, which could result in the differences in proxemics. Overall, these results indicate that the perception of the robot has to be evaluated before the interaction can be studied. However, the results also suggested that VR settings with different visual familiarities are consistent with each other in how they affect HRI proxemics and virtual robot perceptions, indicating the freedom to study HRI in various scenarios in VR. The effect of spatial sound in VR drew a more complex picture and thus calls for more in-depth research to understand its influence on HRI in VR.
@inproceedings{li2019comparing,title={Comparing Human-Robot Proxemics between Virtual Reality and the Real World},author={Li, Rui and van Almkerk, Marc and {van Waveren}, Sanne and Carter, Elizabeth and Leite, Iolanda},booktitle={2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI)},pages={431--439},year={2019},organization={IEEE},html={https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=8673116}}
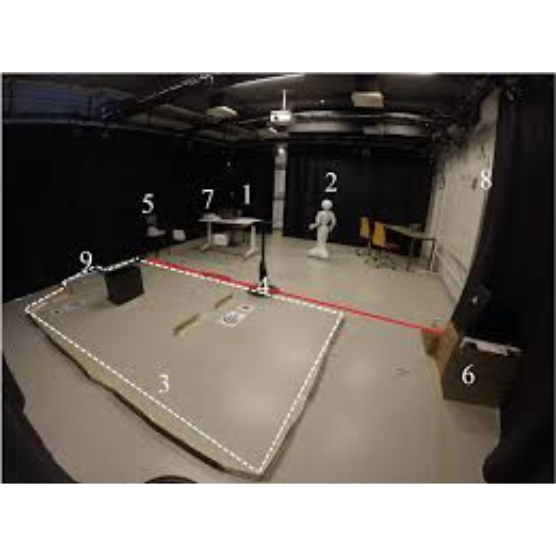
Take One For the Team: The Effects of Error Severity in Collaborative Tasks with Social Robots
Van Waveren, Sanne, Carter, Elizabeth J, and Leite, Iolanda
In Proceedings of the 19th ACM International Conference on Intelligent Virtual Agents 2019
We explore the effects of robot failure severity (no failure vs. low-impact vs. high-impact) on people’s subjective ratings of the robot. We designed an escape room scenario in which one participant teams up with a remotely-controlled Pepper robot. We manipulated the robot’s performance at the end of the game: the robot would either correctly follow the participant’s instructions (control condition), the robot would fail but people could still complete the task of escaping the room (low-impact condition), or the robot’s failure would cause the game to be lost (high-impact condition). Results showed no difference across conditions for people’s ratings of the robot in terms of warmth, competence, and discomfort. However, people in the low-impact condition had significantly less faith in the robot’s robustness in future escape room scenarios. Open-ended questions revealed interesting trends that are worth pursuing in the future: people may view task performance as a team effort and may blame their team or themselves more for the robot failure in case of a high-impact failure as compared to the low-impact failure.
@inproceedings{vanWaveren2019take,title={Take One For the Team: The Effects of Error Severity in Collaborative Tasks with Social Robots},author={Van Waveren, Sanne and Carter, Elizabeth J and Leite, Iolanda},booktitle={Proceedings of the 19th ACM International Conference on Intelligent Virtual Agents},pages={151--158},year={2019},organization={ACM},html={https://dl.acm.org/doi/pdf/10.1145/3308532.3329475}}
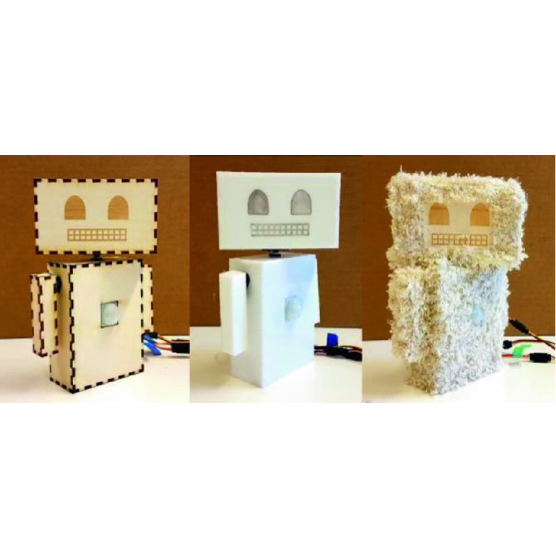
Knock on wood: The effects of material choice on the perception of social robots
Van Waveren, Sanne, Björklund, Linnéa, Carter, Elizabeth J, and Leite, Iolanda
In International Conference on Social Robotics 2019
Many people who interact with robots in the near future will not have prior experience, and they are likely to intuitively form their first impressions of the robot based on its appearance. This paper explores the effects of component material on people’s perception of the robots in terms of social attributes and willingness to interact. Participants watched videos of three robots with different outer materials: wood, synthetic fur, and plastic. The results showed that people rated the perceived warmth of a plastic robot lower than a wooden or furry robot. Ratings of perceived competence and discomfort did not differ between the three robots.
@inproceedings{vanWaveren2019knock,title={Knock on wood: The effects of material choice on the perception of social robots},author={Van Waveren, Sanne and Bj{\"o}rklund, Linn{\'e}a and Carter, Elizabeth J and Leite, Iolanda},booktitle={International Conference on Social Robotics},pages={211--221},year={2019},organization={Springer, Cham}}
2017
Groups in conflict at the airport: How people think a robot should act
Joosse, M,
van Waveren, S, Zaga, C, and Evers, V
In CSCW’17 workshop on robots in groups and teams 2017
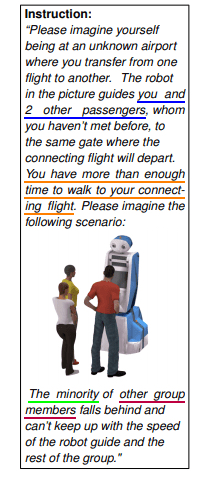
As robots provide services to groups of people conflicts can arise forcing the robots to decide which action to take. In this extended abstract we present a study in which we collected qualitative data on peoples’ ideas of appropriate robot responses when encountering conflict situations while guiding passengers at an airport. We collected, coded and analyzed free text data from 118 participants, and will report on the dataset and general results. In general participants’ believed the needs of the many outweigh the needs of the few: the robot should move on.
@inproceedings{joosse2017groups,title={Groups in conflict at the airport: How people think a robot should act},author={Joosse, M and {van Waveren}, S and Zaga, C and Evers, V},booktitle={CSCW’17 workshop on robots in groups and teams},volume={26},year={2017},html={https://sannevw.github.io/assets/pdf/Joosse_etal_2017.pdf}}


 Gesticulator: A framework for semantically-aware speech-driven gesture generation [Best Paper Award
Gesticulator: A framework for semantically-aware speech-driven gesture generation [Best Paper Award ] In Proceedings of the 2020 International Conference on Multimodal Interaction 2020
] In Proceedings of the 2020 International Conference on Multimodal Interaction 2020