Sanne van Waveren 🟥
Pronounciation of my first name
I am a Postdoctoral Fellow at Georgia Institute of Technology. I work on safe human-robot interaction in the Cognitive Optimization and Relational (CORE) Robotics lab headed by Dr. Matthew Gombolay.
Prior to joining Georgia Tech, I received my PhD on correcting robot behavior using non-expert feedback at KTH Royal Institute of Technology. During my PhD, I also had the opportunity to spent three months at the TBD Lab, Robotics Institute at Carnegie Mellon University.
My vision is a future where interactive robots operate seamlessly in human environments. My research develops methods that use human feedback and formal techniques, grounded in logic and mathematics, to enable robots to adapt their behavior autonomously and reliably.
For an up-to-date list of my papers see my Google Scholar page.
latest news
| Jan 22, 2025 |
|
Paper Accepted at ICLR 2025: Generalized Behavior Learning from Diverse Demonstrations Read more |
|---|---|---|
| Jul 16, 2024 |
|
Excited to have participated as a mentor in the Inclusion@R:SS initiative. |
| Jun 20, 2024 |
|
It was a pleasure to host AI 4 Black Kids, a non-profit with the mission to empower and elevate Black youth through Artificial Intelligence (AI) and machine learning while promoting ethical and responsible use of these technologies. |
| Jun 5, 2024 |
|
Our comprehensive review on Interactive and Explainable Robot Learning is out. |
| May 1, 2024 |
|
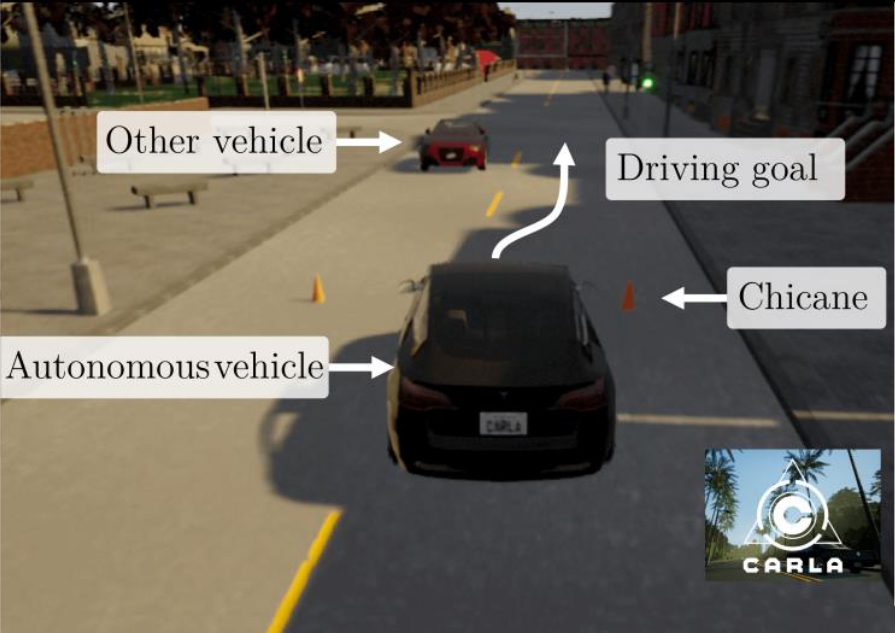
Book chapter published titled “Autonomous Vehicles: A Technical Introduction” on the design and operation of self-driving vehicles, together with Chris Pek (TU Delft). Editors: Hans Steege, Ilaria Amelia Caggiano, Maria Cristina Gaeta, Benjamin von Bodungen. |
| Mar 23, 2024 |
|
We organized an R:SS’24 Workshop on Safety and Normative Behaviors in Human-Robot Interaction! More information can be found here: workshop’s website |
| Mar 23, 2024 |
|
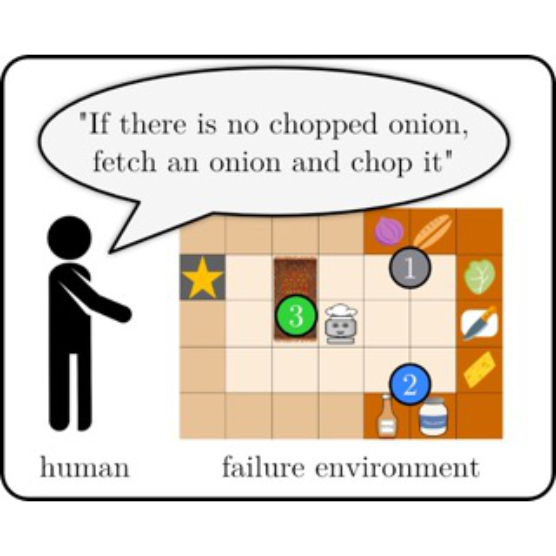
We organized an R:SS’24 Workshop on Robot Execution Failures and Failure Management Strategies! More information can be found via this link to our workshop’s website |
| Dec 22, 2023 |
|
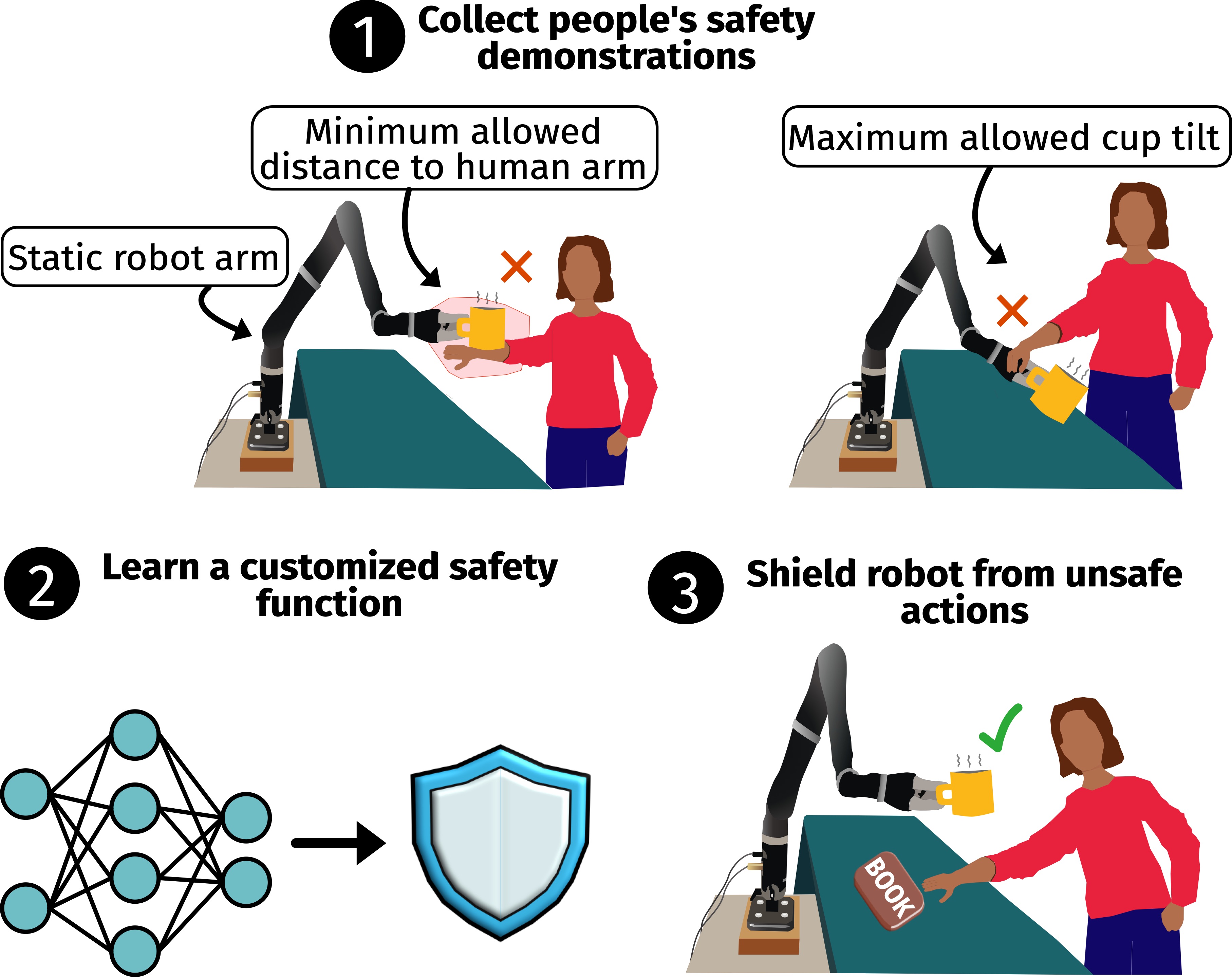
Paper Accepted at HRI 2024: Enhancing Safety in Learning from Demonstration Algorithms via Control Barrier Function Shielding. Read more |
| Dec 21, 2023 |
|
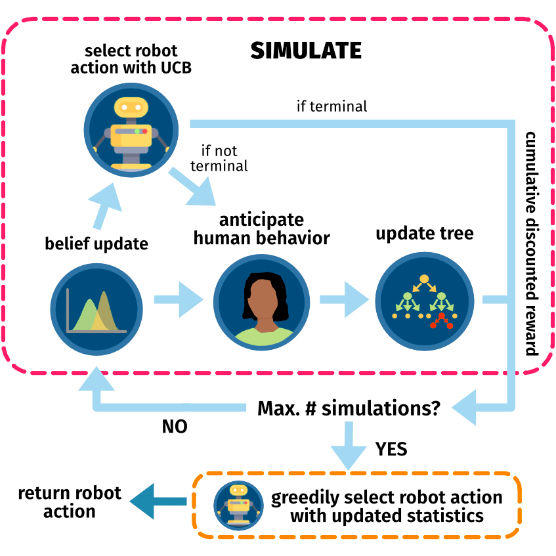
Paper Accepted at AAMAS 2024: Mixed-Initiative Human-Robot Teaming under Suboptimality with Online Bayesian Adaptation Read more |
| Oct 17, 2023 |
|
Paper Accepted at OOD Workshop @ CoRL 2023: Generalized Behavior Learning from Diverse Demonstrations Read more |
selected publications
 Gesticulator: A framework for semantically-aware speech-driven gesture generation [Best Paper Award
Gesticulator: A framework for semantically-aware speech-driven gesture generation [Best Paper Award ] In Proceedings of the 2020 International Conference on Multimodal Interaction 2020
] In Proceedings of the 2020 International Conference on Multimodal Interaction 2020