Paper Accepted into HRI23: Increasing Perceived Safety in Motion Planning for Human-Drone Interaction
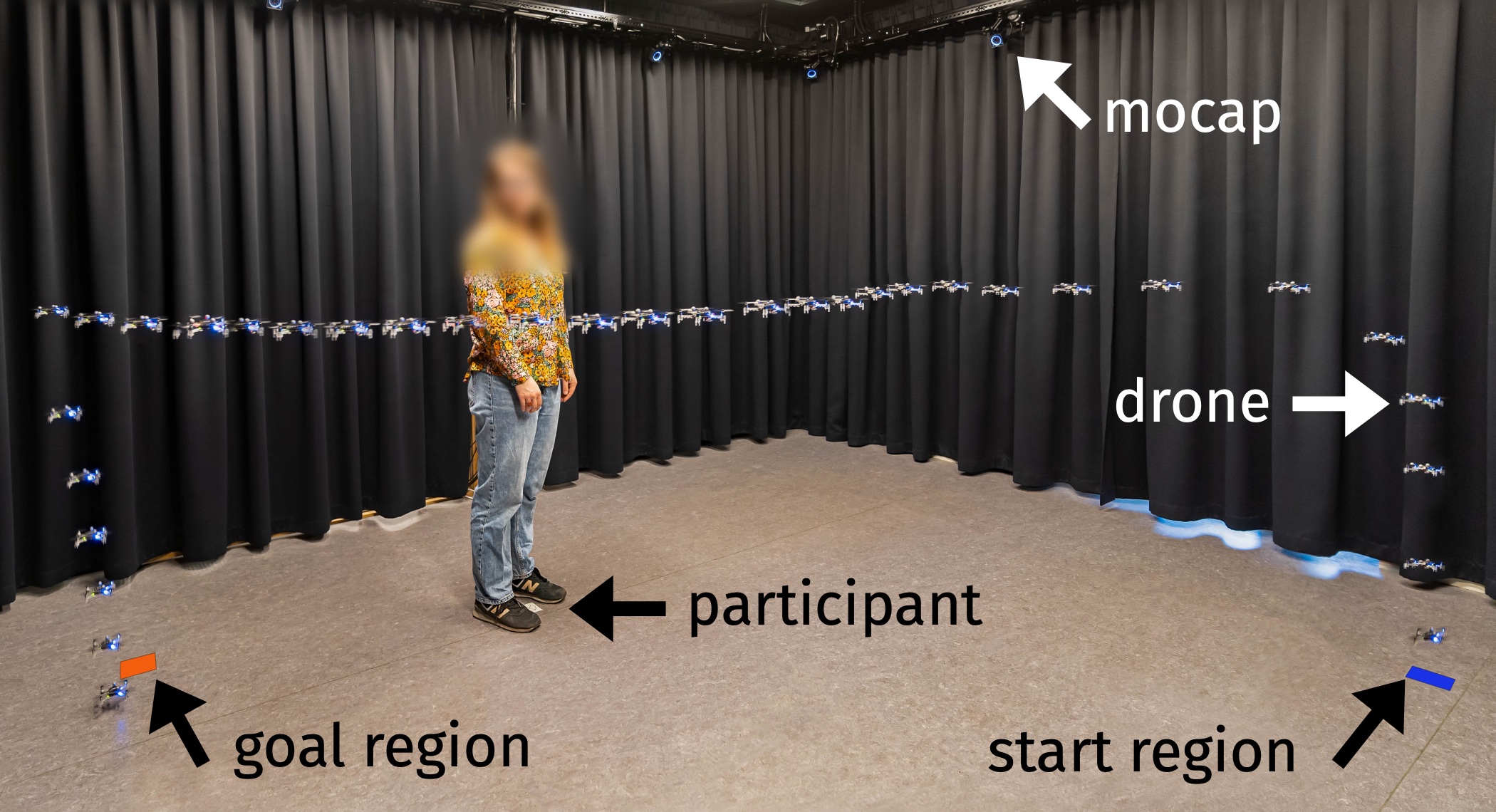
Overview of experiment room in our user study.
Our work on increasing perceived safety while also ensuring physical safety, i.e., avoiding collisions at all times, has been accepted to HRI’23. We will present this work in March in Stockholm.