Paper Accepted into IVA2019: Take One For the Team: The Effects of Error Severity in Collaborative Tasks with Social Robots
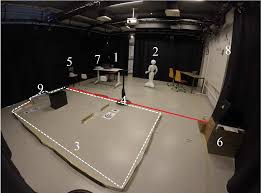
Our work got accepted to IVA2019. We explore the effects of robot failure severity (no failure vs. low-impact vs. high-impact) on people's subjective ratings of the robot. We designed an escape room scenario in which one participant teams up with a remotely-controlled Pepper robot. We manipulated the robot's performance at the end of the game: the robot would either correctly follow the participant's instructions (control condition), the robot would fail but people could still complete the task of escaping the room (low-impact condition), or the robot's failure would cause the game to be lost (high-impact condition). Take-away messages from this work:
-
People did not rate the robot differently across conditions in terms of warmth, competence, and discomfort.
-
People in the low-impact condition had significantly less faith in the robot’s robustness in future escape room scenarios.
-
Qualitative analysis suggests that people may view task performance as a team effort and may blame their team or themselves more for the robot failure in case of a high-impact failure as compared to the low-impact failure.
@inproceedings{van2019take,
title={Take One For the Team: The Effects of Error Severity in Collaborative Tasks with
Social Robots},
author={Van Waveren, Sanne and Carter, Elizabeth J and Leite, Iolanda},
booktitle={Proceedings of the 19th ACM International Conference on Intelligent Virtual
Agents},
pages={151--158},
year={2019},
organization={ACM}
}
</code>